Zawartość
to wiki, co oznacza, że wiele artykułów jest napisanych przez kilku autorów. Aby stworzyć ten artykuł, 41 osób, niektóre anonimowe, uczestniczyło w jego edycji i ulepszaniu w miarę upływu czasu.Wiele osób uważa, że robot jest samodzielną maszyną. Jeśli jednak nieco poszerzymy definicję tego terminu, możemy również uznać za roboty zdalnie sterowane. Może się wydawać, że zbudowanie takiego urządzenia jest czymś skomplikowanym, ale w rzeczywistości nie ma nic prostszego, gdy tylko zdobędziesz niezbędną wiedzę. Wkrętak, odrobina nauki i gotowe!
etapy
-

Wiedz, co zamierzasz zbudować. Nie zbudujesz tutaj humanoidalnego człowieka, który wykona całą twoją brudną robotę. Nigdzie nie zrobisz robota za pomocą szczypiec, które mogą unieść 50 kg. Musisz zacząć od zbudowania robota, który może poruszać się do przodu, do tyłu i na boki podczas obsługi pilota. Kiedy jednak zrozumiesz podstawy tych manewrów i stworzysz tego prostego robota, możesz go zmodyfikować i przejść do bardziej skomplikowanych rzeczy. Zawsze należy pamiętać, że robot nigdy nie jest skończony. Zawsze możesz go edytować i ulepszać. -

Zaplanuj robota. Zanim zaczniesz budować, musisz zamówić potrzebne przedmioty. Aby to zrobić, musisz pomyśleć o projekcie. Jeśli to twoje pierwsze dzieło, wybierz coś prostego z dwoma serwomechanizmami na plastikowej płytce. To bardzo prosta rzecz, która pozwala później dodać więcej przedmiotów, jeśli chcesz. Otrzymasz wtedy coś o wymiarach 15 × 20 cm. W przypadku takiego prostego robota wystarczy narysować projekt na kartce papieru za pomocą linijki. Ponieważ jest mały, narysuj go w rzeczywistej skali na papierze. Kiedy budujesz bardziej złożone maszyny, możesz nauczyć się korzystać z oprogramowania do projektowania wspomaganego komputerowo (CAD) lub podobnych programów, takich jak Google Sketchup. -

Wybierz elementy. Nie musisz ich jeszcze zamawiać, ale musisz wybrać je na tym etapie i wiedzieć, gdzie je kupić. Spróbuj wybrać jak najmniej stron internetowych, aby zaoszczędzić pieniądze na kosztach wysyłki. Potrzebujesz materiałów do podwozia, dwóch serwomotorów, akumulatora, nadajnika i odbiornika.- Wybierz siłownik. Aby przenieść robota, potrzebujesz silników. Musisz zainstalować jeden dla każdego koła. W ten sposób możesz zastosować najprostszą metodę sterowania, różnicę. Oznacza to, że aby przejść do przodu, dwa silniki skręcą do przodu, do tyłu, obrócą zarówno do tyłu, jak i do obrotu, jeden z nich obróci się, a drugi nie będzie się poruszał. Serwosilnik jest innym urządzeniem niż podstawowy silnik prądu stałego, ponieważ ma koła zębate, może obracać się tylko o 180 stopni i może wskazywać swoją aktualną pozycję. Ten projekt spodoba się tego rodzaju silnikom, ponieważ są łatwiejsze w użyciu i nie trzeba kupować drogiej skrzyni biegów. Gdy zrozumiesz, jak zbudować robota sterowanego zdalnie, możesz zrobić innego (lub zmodyfikować go), aby zainstalować silniki prądu stałego. Przy zakupie serwomotorów należy wziąć pod uwagę cztery kwestie: prędkość, moment obrotowy, rozmiar i wagę oraz obrót. Ponieważ serwomotory nie mogą obracać się o więcej niż 180 stopni, nie będziesz w stanie dostać się daleko. Istnieją jednak silniki, które mogą obracać się o 360 stopni, co pozwala na ich ciągłą pracę. Upewnij się, że te, które kupujesz, należą do tej kategorii. Rozmiar i waga nie są tak naprawdę ważnymi kwestiami dla tego projektu, ponieważ i tak masz dużo miejsca. Spróbuj znaleźć jakiś średni rozmiar. Moment obrotowy silnika wskazuje siłę silnika. W tym miejscu przydatne stają się koła zębate. Jeśli nie ma żadnych biegów, a moment obrotowy silnika jest niski, robot nie będzie mógł ruszyć do przodu, ponieważ nie będzie miał siły. Musisz znaleźć wysoki moment obrotowy silnika, ale uważaj, ponieważ im wyższy, tym mniejsza prędkość. W tym projekcie musisz znaleźć równowagę między prędkością a momentem obrotowym. Ponadto, kiedy skończysz, zawsze możesz kupić mocniejsze lub szybsze serwomotory. Hitec HS-311 jest zalecany do tego pierwszego robota. Jest to silnik o dobrym stosunku prędkości do momentu obrotowego, jest tani, a jego rozmiar jest idealny do tego projektu. Wyszukaj online najbliższy sklep, który go oferuje.
- Ponieważ siłownik może obracać się tylko o 180 stopni, konieczna będzie zmiana siłownika, aby działał w sposób ciągły. Zmieniając go, anulujesz gwarancję, ale jest to niezbędny krok, od którego zależy reszta.
- Wybierz baterię. Musisz karmić robota elektrycznością. Nie należy używać prądu stałego (tzn. Kabla podłączonego do gniazda), zamiast tego należy użyć akumulatora prądu stałego.
- Wybierz typ baterii. Istnieją trzy główne typy baterii, które należy wziąć pod uwagę. Są to baterie litowe (LiPo), NiMH, NiCad i baterie alkaliczne.
- Akumulatory LiPo to najnowszy typ, który można kupić i są niezwykle lekkie. Są jednak niebezpieczne, są drogie i wymagają odpowiedniej ładowarki. Powinieneś z nich korzystać tylko wtedy, gdy masz już doświadczenie w budowie robotów i jesteś gotów zapłacić nieco więcej za swój projekt.
- Akumulatory NiCad to akumulatory wielokrotnego ładowania. Są często używane do robotów. Głównym problemem tego modelu jest to, że wytrzyma znacznie mniej, jeśli naładujesz akumulatory, gdy nie są całkowicie rozładowane.
- Akumulatory NiMH mają rozmiar, wagę i cenę podobne do akumulatorów NiCad, ale działają lepiej i jest to model, który jest ogólnie zalecany dla początkujących.
- Baterie alkaliczne są najczęstszym typem baterii jednorazowego użytku. Są wszędzie (prawdopodobnie masz je w domu), są tanie i łatwe do zdobycia. Jednak ich życie jest krótkie i będziesz musiał go kupić na stałe. Nie używaj tego.
- Sprawdź dane techniczne baterii. Musisz wybrać napięcie dla swojej baterii. Ogólnie rzecz biorąc, większość robotów tego typu pracuje pod napięciem między 4,8 a 6 V. Większość serwomotorów będzie dobrze pracować pod napięciem tego typu. Zasadniczo zaleca się stosowanie napięcia 6 V (jeśli twoje serwomotory mogą to obsługiwać, co ma miejsce w większości przypadków), ponieważ pozwala im wysłać większą moc i przyspieszyć ich pracę. Teraz musisz pomyśleć o pojemności baterii. Jest wskazany w mAh (miliamperach przez godzinę). Im wyższa wartość, tym droższy i droższy będzie akumulator. W przypadku robota o oczekiwanych rozmiarach zaleca się stosowanie baterii 1800 mAh. Jeśli wahasz się między akumulatorem 1 4500 a 2000 mAh dla tego samego napięcia i tej samej masy, wybierz akumulator o wartości 2 000. Będzie on słuchał niewiele drożej, ale będzie lepszy niż poprzedni. Nie należy zapominać o ładowarce do wybranego akumulatora. Wykonaj wyszukiwanie online, aby znaleźć odpowiednią ładowarkę.
- Wybierz typ baterii. Istnieją trzy główne typy baterii, które należy wziąć pod uwagę. Są to baterie litowe (LiPo), NiMH, NiCad i baterie alkaliczne.
- Wybierz materiał dla swojego robota. Potrzebuje podwozia, na którym zainstalujesz sprzęt elektroniczny. Większość maszyn tego rozmiaru jest wykonana z tworzywa sztucznego lub aluminium. Dla początkujących zaleca się stosowanie tworzywa sztucznego zwanego polietylenem o wysokiej gęstości (PE-HD). Jest łatwy w obsłudze i nie kosztuje dużo. Wybierając żądaną grubość, wybierz 6 mm. Decydując się na szerokość, powinieneś wybrać większą płytę niż maszyna, którą chcesz zbudować na wypadek, gdybyś popełnił błąd, przecinając ją. Zasadniczo zaleca się kupowanie robota o podwójnej wielkości. Jednak nadal powinieneś kupować więcej. Wyszukaj online, aby kupić PE-60 × 60 cm i płytę PE-HD o grubości 6 mm.
- Wybierz nadajnik i odbiornik. To najdroższa część robota. Jest to również najważniejsze, ponieważ bez niego nie będziesz mógł go przenieść. Zdecydowanie zaleca się kupowanie dobrego nadajnika i dobrego nadajnika od samego początku, ponieważ są to elementy, które ograniczą to, co możesz zrobić ze swoim dziełem. Możesz przenieść swoją maszynę za pomocą taniego nadajnika i odbiornika, ale nie będziesz mógł nic do niej dodać. Ponadto można ponownie użyć nadajnika do innych projektów, które zostaną zamontowane w przyszłości. Zamiast kupować taniej teraz, a później droższe, kup urządzenie droższe teraz. Pozwoli ci to zaoszczędzić pieniądze na dłuższą metę. W każdym razie będziesz musiał wybrać odpowiednie częstotliwości. Najczęściej używane częstotliwości to 27 MHz, 72 MHz, 75 MHz i 2,4 GHz. 27 MHz jest używane w samolotach i samochodach. Jest to częstotliwość najczęściej używana do tanich zdalnie sterowanych zabawek. Nie jest zalecany do niczego innego niż małe projekty. 72 MHz może być używane tylko w samolotach. Ponieważ częstotliwość ta jest zwykle stosowana w modelach samolotów, jest ona zabroniona dla samolotów naziemnych. Jeśli korzystasz z częstotliwości 72 MHz, możesz naruszyć prawo swojego kraju, ale możesz również powodować zakłócenia w pobliżu modeli. Może to spowodować ich awarię i znaczne koszty napraw, a co gorsza, samolot może kogoś uderzyć i go zabić. 75 MHz jest używane tylko dla modeli naziemnych, więc możesz z niego korzystać. Jednak spośród wszystkich tych częstotliwości 2,4 GHz jest najlepsza. Powoduje mniej zakłóceń niż inne częstotliwości. Zdecydowanie zaleca się wydanie kilku dodatkowych euro na zakup nadajnika i odbiornika 2,4 GHz. Po wybraniu częstotliwości, której chcesz użyć, musisz zdecydować, które „kanały” zainstalujesz w nadajniku i odbiorniku. Zasadniczo odnoszą się do rzeczy, którymi można sterować za pomocą robota. Do tego projektu potrzebujesz dwóch. Jeden kanał pozwala maszynie poruszać się do przodu i do tyłu, a drugi obracać się na boki. Jednak zaleca się mieć co najmniej trzy. Po zakończeniu budowy możesz chcieć coś dodać.Jeśli zainstalujesz cztery, powinieneś mieć dwa kontrolery. Dzięki czterokanałowej parze nadajnik / odbiornik możesz ewentualnie dodać zacisk. Jak wspomniano wcześniej, kup najlepszą możliwą parę dla swojego budżetu, abyś nie musiał później kupować lepszej. Możesz użyć nadajnika, a nawet odbiornika później w innych projektach. Na przykład możesz kupić Spectrum DX5e 5-kanałowy system radiowy 2.4 Ghz Mode 2 i AR500.
- Wybierz koła. Wybierając koła, należy wziąć pod uwagę trzy czynniki: średnicę, przyczepność i układ mocowania silnika. Średnica odpowiada długości koła, zaczynając od krawędzi, przechodząc przez środek i docierając do przeciwległej krawędzi. Im większa średnica, tym szybciej koło i łatwiej robot może pokonywać zbocza, ale ma mniejszy moment obrotowy. Jeśli masz mniejsze koło, trudniej będzie się wspinać lub jechać szybciej, ale będzie on miał większą moc. Przyczepność pozwala wiedzieć, czy koło dobrze przylega do powierzchni, na których je położysz. Musisz uzyskać koła z gumową lub piankową powłoką, aby się nie ślizgały. Większość kół zaprojektowano z myślą o łatwym przymocowaniu do serwomotorów, zwykle wystarczy przykręcić je bezpośrednio, więc nie powinieneś się zbytnio przejmować. Ogólnie zaleca się preferowanie koła o średnicy od 8 do 12 cm z gumową powłoką. Będziesz także potrzebował dwóch. Dowiedz się również o precyzyjnych tarczach tarczowych.
- Wybierz siłownik. Aby przenieść robota, potrzebujesz silników. Musisz zainstalować jeden dla każdego koła. W ten sposób możesz zastosować najprostszą metodę sterowania, różnicę. Oznacza to, że aby przejść do przodu, dwa silniki skręcą do przodu, do tyłu, obrócą zarówno do tyłu, jak i do obrotu, jeden z nich obróci się, a drugi nie będzie się poruszał. Serwosilnik jest innym urządzeniem niż podstawowy silnik prądu stałego, ponieważ ma koła zębate, może obracać się tylko o 180 stopni i może wskazywać swoją aktualną pozycję. Ten projekt spodoba się tego rodzaju silnikom, ponieważ są łatwiejsze w użyciu i nie trzeba kupować drogiej skrzyni biegów. Gdy zrozumiesz, jak zbudować robota sterowanego zdalnie, możesz zrobić innego (lub zmodyfikować go), aby zainstalować silniki prądu stałego. Przy zakupie serwomotorów należy wziąć pod uwagę cztery kwestie: prędkość, moment obrotowy, rozmiar i wagę oraz obrót. Ponieważ serwomotory nie mogą obracać się o więcej niż 180 stopni, nie będziesz w stanie dostać się daleko. Istnieją jednak silniki, które mogą obracać się o 360 stopni, co pozwala na ich ciągłą pracę. Upewnij się, że te, które kupujesz, należą do tej kategorii. Rozmiar i waga nie są tak naprawdę ważnymi kwestiami dla tego projektu, ponieważ i tak masz dużo miejsca. Spróbuj znaleźć jakiś średni rozmiar. Moment obrotowy silnika wskazuje siłę silnika. W tym miejscu przydatne stają się koła zębate. Jeśli nie ma żadnych biegów, a moment obrotowy silnika jest niski, robot nie będzie mógł ruszyć do przodu, ponieważ nie będzie miał siły. Musisz znaleźć wysoki moment obrotowy silnika, ale uważaj, ponieważ im wyższy, tym mniejsza prędkość. W tym projekcie musisz znaleźć równowagę między prędkością a momentem obrotowym. Ponadto, kiedy skończysz, zawsze możesz kupić mocniejsze lub szybsze serwomotory. Hitec HS-311 jest zalecany do tego pierwszego robota. Jest to silnik o dobrym stosunku prędkości do momentu obrotowego, jest tani, a jego rozmiar jest idealny do tego projektu. Wyszukaj online najbliższy sklep, który go oferuje.
-

Kup sprzęt. Po wybraniu odpowiedniego sprzętu przejdź do trybu online, aby go kupić. Spróbuj zamówić go na jak najmniejszej liczbie stron, aby zaoszczędzić na wysyłce. -

Zmierz i wytnij ramkę. Weź linijkę i marker i zmierz długość i szerokość ramy na zakupionym talerzu. Rozważ narysowanie ramy 15 x 20 cm. Zmierz go poprawnie i upewnij się, że narysowane linie nie są krzywe i mają odpowiednią długość. Nie zapominaj o tej zasadzie: zmierz dwa razy, wytnij raz. Teraz możesz wyciąć talerz. Jeśli kupiłeś PE-HD, możesz go wyciąć w taki sam sposób, jak drewnianą deskę tego samego rozmiaru. -

Złóż robota. Teraz, gdy masz już cały potrzebny sprzęt i wytniesz ramę, czas złożyć części razem. To będzie najłatwiejszy krok, jeśli wcześniej pomyślałeś o projektowaniu.- Zamontować serwosilniki z tyłu plastikowej płyty do przodu. Musisz zamontować je po bokach, aby część, która ma się obrócić, była skierowana na zewnątrz. Pamiętaj, aby zostawić wystarczająco dużo miejsca, aby zamontować koła.
- Przymocuj koła do serwomotorów za pomocą śrub sprzedawanych w skrzynce silnika.
- Przyklej kawałek rzepu do odbiornika i akumulatora.
- Połóż dwa kawałki rzepu na robocie, na którym przykleisz odbiornik i akumulator.
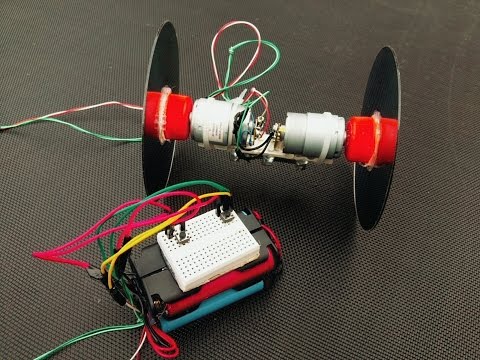
- Teraz twój robot powinien mieć dwa koła z przodu, a podwozie powinno lekko opadać z tyłu. W tym projekcie nie będzie trzeciego koła, tył maszyny będzie ocierał się tylko o ziemię.
-

Podłącz kable. Po złożeniu elementów musisz nawiązać połączenia z odbiornikiem. Podłącz baterię do gniazda w odbiorniku. Sprawdź dokładnie połączenia. Następnie podłącz serwosilniki do pierwszych dwóch kanałów odbiornika, gdzie jest napisane „kanał 1” i „kanał 2”. -

Naładuj akumulator. Odłącz akumulator odbiornika i podłącz go do ładowarki. Poczekaj, aż bateria będzie pełna. Cierpliwość może potrwać do 24 godzin. -

Projekt powinien być teraz zakończony. Naciśnij przycisk nadajnika, aby przesunąć robota do przodu. Zbuduj tor przeszkód, baw się z psem i kotem, aby pobiec za robotem. Po zakończeniu zabawy możesz ulepszyć robota!
- Sprzęt do podwozia: płyta PE-HD większa niż wymagany rozmiar
- Dwa serwosilniki (np. HiTec HS-311)
- Odbiornik i nadajnik
- Akumulator (na przykład akumulator NiMH 2000 mAh 6 V)
- Ładowarka do akumulatora
- 2 koła z precyzyjnym talerzem o średnicy 12 cm
- Rzep